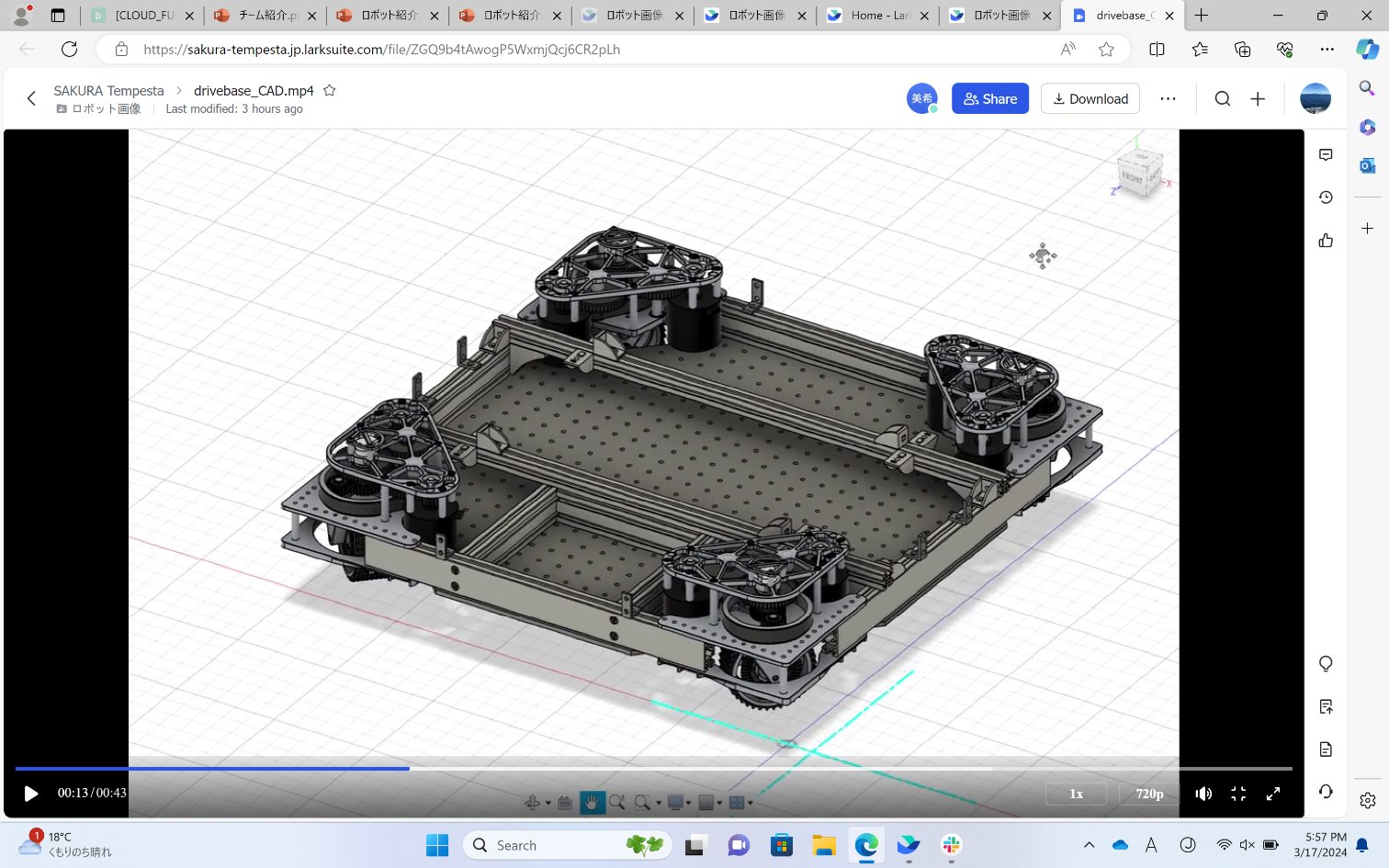
ハワイ大会まであと3日となり、ついにロボットを完成させることができました!

やっぱり設計ソフトの中で見るものとは全然違うように感じますね。
去年のロボットに比べると全体の大きさが一回りコンパクト、スタイリッシュになっていて個人的にはとても気に入っています!
スタイリッシュになっただけでなく、今回のロボットはいつもとは一味違います..
今までタンクという機構を使用していましたが、今シーズンからはスワーブという360°全方向に自由自在に動くことのできる機構を採用したからです!
※タンクとは…
左右の車輪をそれぞれ逆向きに回すことで回転できるロボットの足回りのことです。
機動性があまりよくないというデメリットがあります。
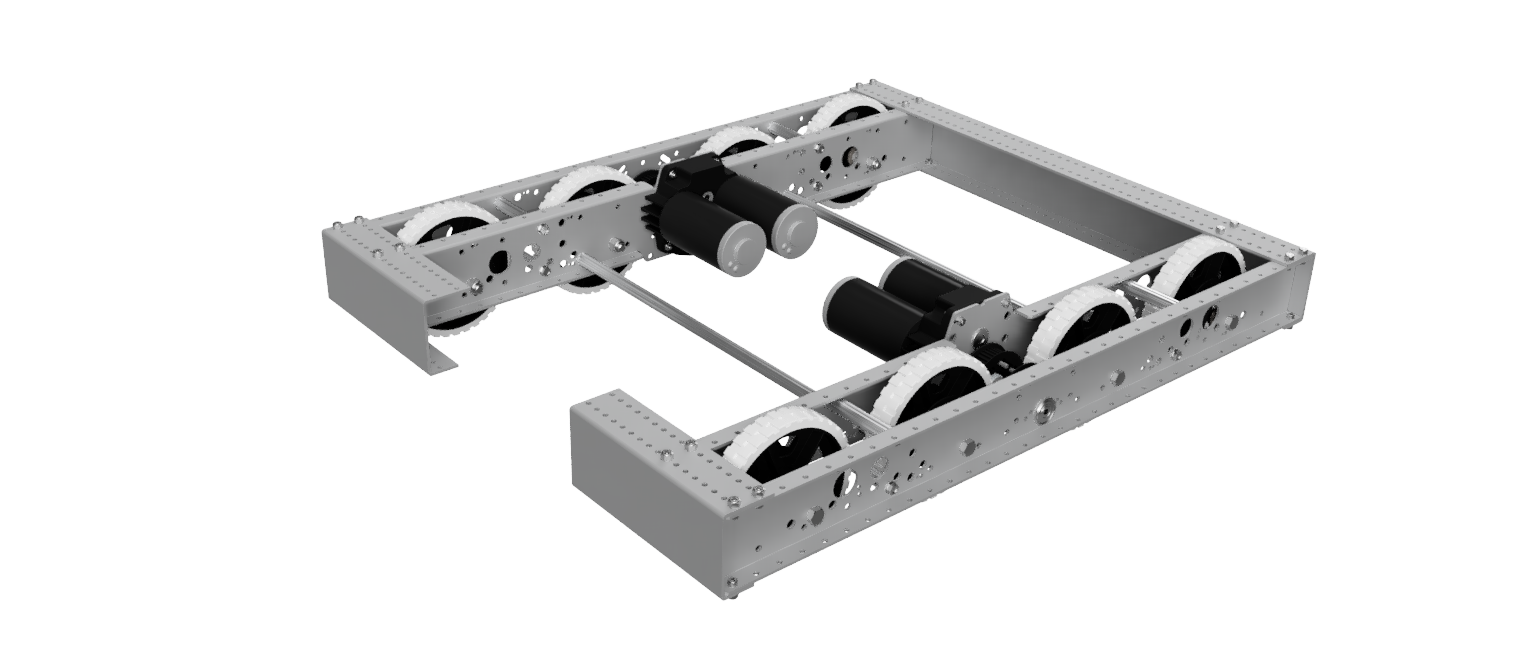
それに加え、今回のロボットは背丈も比較的低く、重心が下の方によっているので、実際に走ってるときの安定性は抜群です!
また、今回実際にロボットを組み立ててみて、設計ソフトの中ではわからなかったような問題に遭遇しました。
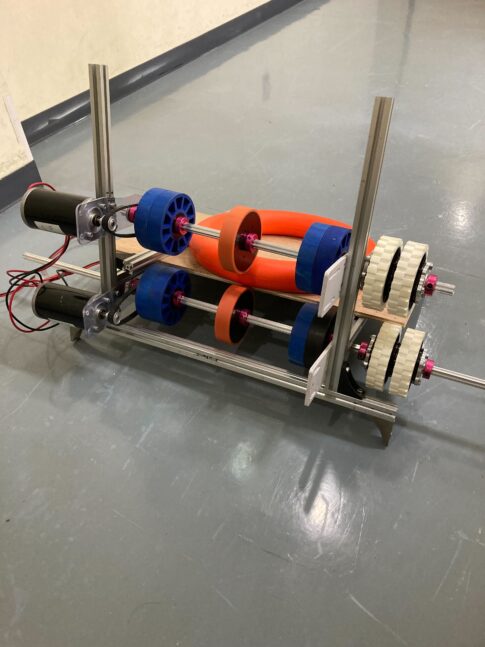
それは、想定していたよりもシューターでNoteを発射するときの威力が弱くなってしまうということです。
原因を究明してみたところ、

上の写真のオレンジ色のローラーのところにNoteが挟まるとローラーの回転速度が著しく低下してしまうということでした。
そこで私たちは以下の写真のようにオレンジ色のローラーの横に重りを追加することによって安定性を増し、原因となっていた速度の著しい低下を抑えることができました。

これからハワイ大会までの間だけでも様々な問題に遭遇するとは思いますが、ひとつひとつ着実に解決していこうと思います!
一旦は、ロボットが完成したので、これからはひたすらドライバー練習をしていきます!
今後も進捗に関して、X(旧ツイッター)やCAMPFIREなどで投稿していきますので、これからも応援よろしくお願いします。
また、youtube やInstagram、TikTokでも様々なコンテンツを投稿しているので、ぜひ見ていただけると幸いです!
加えて、現在までクラファンで支援してくださった方々本当にありがとうございました。これからも大会に向けて頑張っていきますので、応援していただけるとうれしいです!!









コメントを残す