コロナウイルスの影響による大会中止について
本日、大会主催者より、新型コロナウイルスの対策として今後のイベント全てを中止するとの発表がありました。 それに伴い、今シーズンの大会参加を断念せざるを得なくなってしまいました。皆様から様々なご支援・ご協力をいただいたにも...
 2024-2025シーズン(8年目)
2024-2025シーズン(8年目) 2024-2025シーズン(8年目)
2024-2025シーズン(8年目)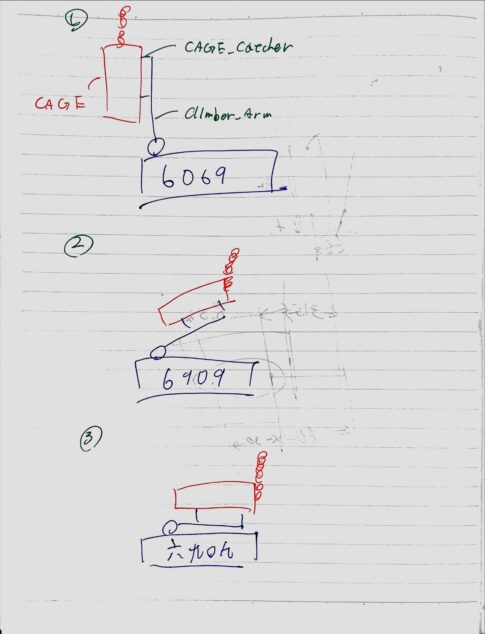 2024-2025シーズン(8年目)
2024-2025シーズン(8年目) 2024-2025シーズン(8年目)
2024-2025シーズン(8年目) 2024-2025シーズン(8年目)
2024-2025シーズン(8年目) 2024-2025シーズン(8年目)
2024-2025シーズン(8年目)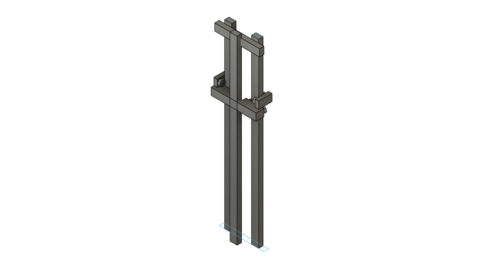 2024-2025シーズン(8年目)
2024-2025シーズン(8年目)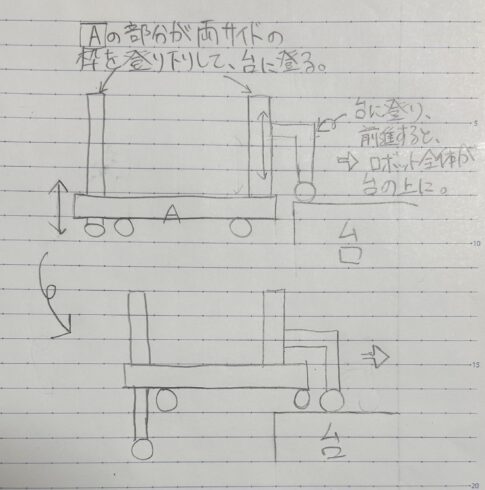 2024-2025シーズン(8年目)
2024-2025シーズン(8年目) 2024-2025シーズン(8年目)
2024-2025シーズン(8年目) 2024-2025シーズン(8年目)
2024-2025シーズン(8年目) 大会
大会本日、大会主催者より、新型コロナウイルスの対策として今後のイベント全てを中止するとの発表がありました。 それに伴い、今シーズンの大会参加を断念せざるを得なくなってしまいました。皆様から様々なご支援・ご協力をいただいたにも...
 製作日記
製作日記3月10日はアイオワの地区大会に向けて、ロボットを出荷しました。午前中まで調整した後、午後一番でトラックに積み込みました。雨天での搬送作業となりましたが、なんとか完遂することができました。 しかし、この後アイオワ大会への...
 製作日記-2020
製作日記-2020今日は天候が悪く、外でのドラバイバー練習ができませんでした。しかし、室内でカラーセンサーの取り付けとコントロールパネルのテストを行いました。 Chairman’sは審査員の方の質問に答えるための練習をしました...
 製作日記-2020
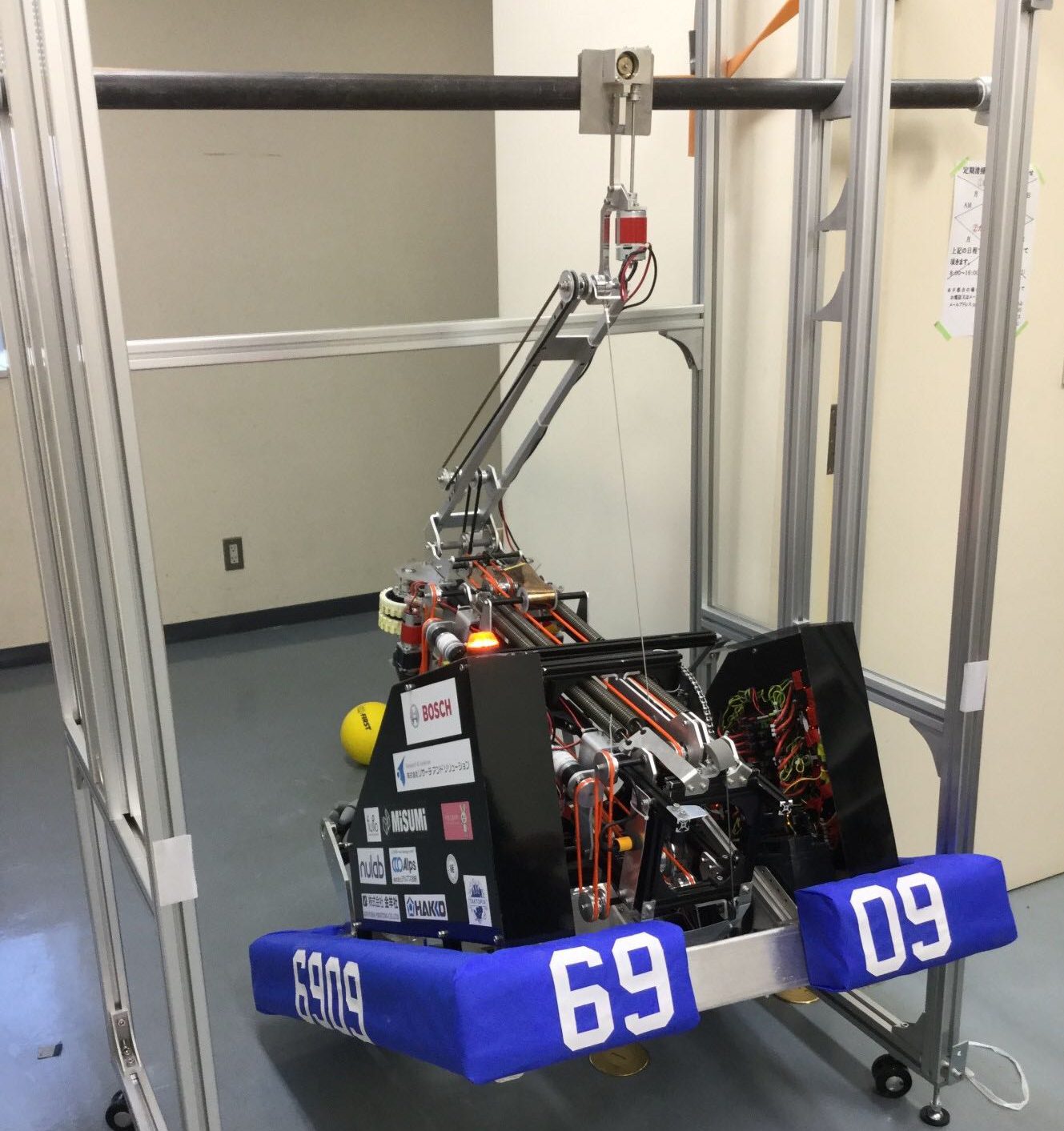
製作日記-2020今日も屋外でロボットの機構の練習を行いました。 途中で雨が降ってきてしまったため、室内でハングの練習を行いました。ハングの練習中、ロボットを吊り下げるために使っていたワイヤーが部品の間に挟まれ、無理な力が加わったことでワ...
製作日記今日は屋外でロボットの機構の練習を行いました。 ボール射出の角度の調整を行い、奥の小さい穴にも何回か入るようになりました。さらに調整してもっと的確に入れられるようにしていきます。 ハング時の高さの調整も行いました。ハング...
 製作日記
製作日記今日はChairman’s、シューターとボール回収の練習を行いました。 シューターのテストは屋外で行ったので、強風の影響を受けてしまい、競技台が倒れそうになってしまったり、発射したボールが遠くまで飛んでいって...
 製作日記
製作日記今日は、昨日壊れた部分の設計とロボットの調整、操作練習を行いました。 メインドライバーが休みだったので、他のメンバーがドライバー体験をしました。やっているうちにだんだんとコツを掴むことができました。 調整では、ボール回収...
 製作日記
製作日記クレートへのチームナンバーの塗装が完了しました✨ 今年のクレートは、去年のよりロボット本体が小さいため、クレート自体もとても小さくなっています!
 製作日記
製作日記今日はハングの機構を試しました。今回のルールでは、ゲームの最後にシーソーのような棒にぶら下がると得点が追加されます。何度もプログラムを調整していくうちにうまく登れるようになりました。 私たちのロボットは、ぶら下がった後に...
 製作日記
製作日記今日は朝6時からクレートの組み立てを行ないました。お昼前にはほぼ完成しました。お気に入りのポイントは、バンパーの収納場所です。 クレート内ではロボットの上にバンパーがピシッと並び、大会会場などではこのクレートを改造しロボ...