オフシーズンロボット第4弾では、前に車輪を出す機構について紹介をしていきたいと思います。
前に出す機構とは?
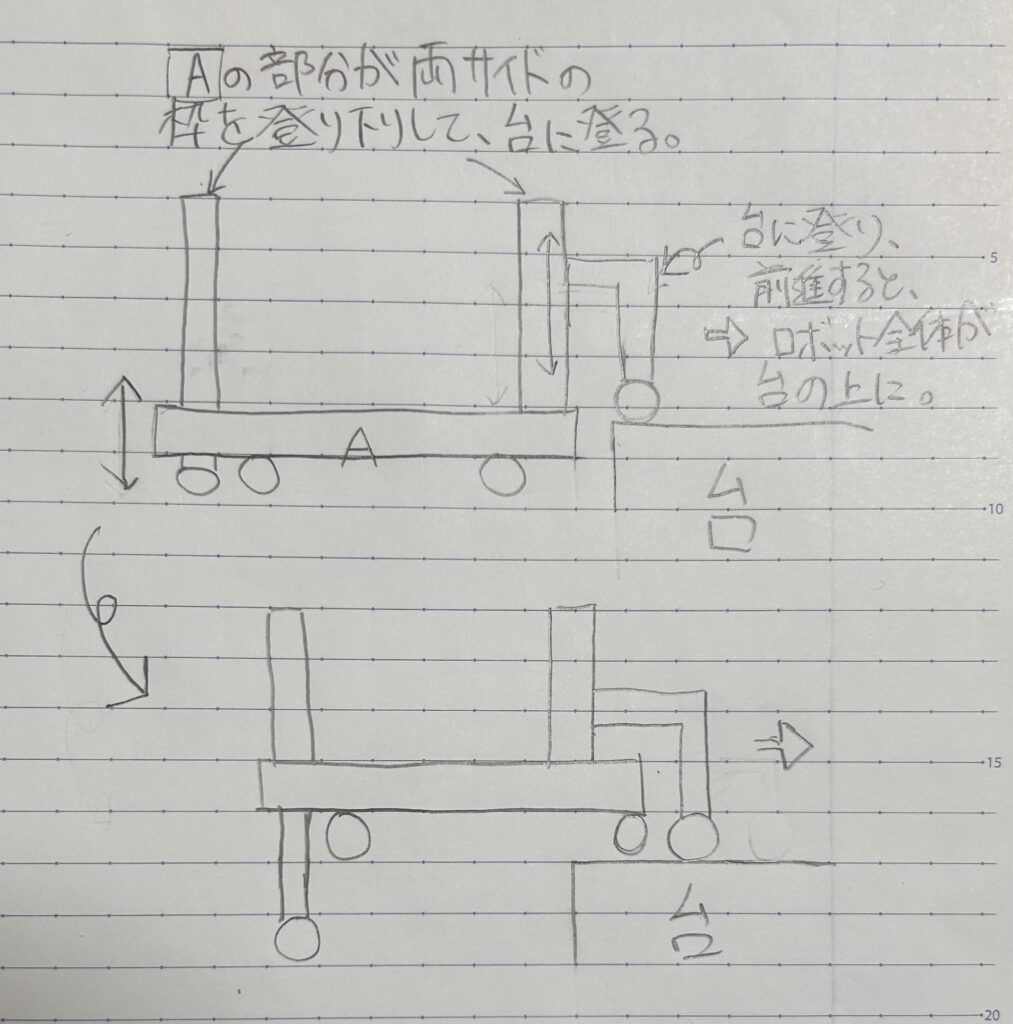
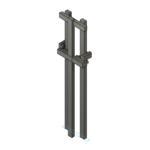
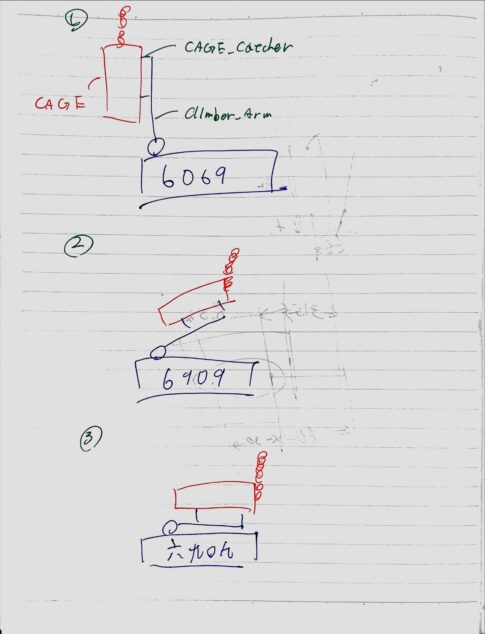
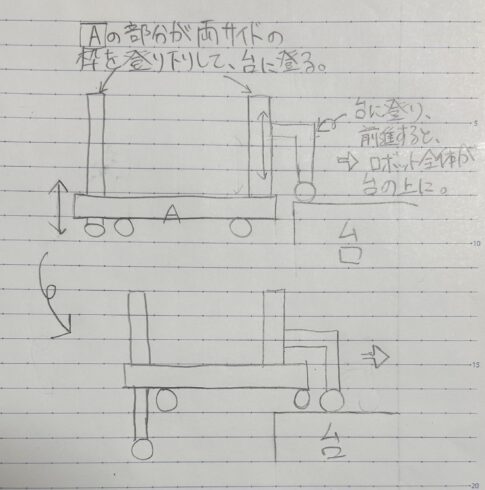
第一弾にもあるように、今回のロボットの目標は高さ55cmの台に登ることです。
前に飛び出ている車輪を台の上に乗せ、ロボットを持ち上げるという仕組みでロボットを持ち上げます。ところが、FRCのルールではゲームが始まる前にロボットのバンパーの外に機構を出してはいけない、というふうになっています。そこで、試合が始まる前にはたたんでおき、ロボットが台に登るときになったら前に出して登る、という機構を採用しました。私はこの前に出す機構のところを担当しています。
リンク機構とエアシリンダ
この車輪を出す機構は色々と種類があるのですが、今回はリンク機構とエアシリンダを使用する方式を採用しました。
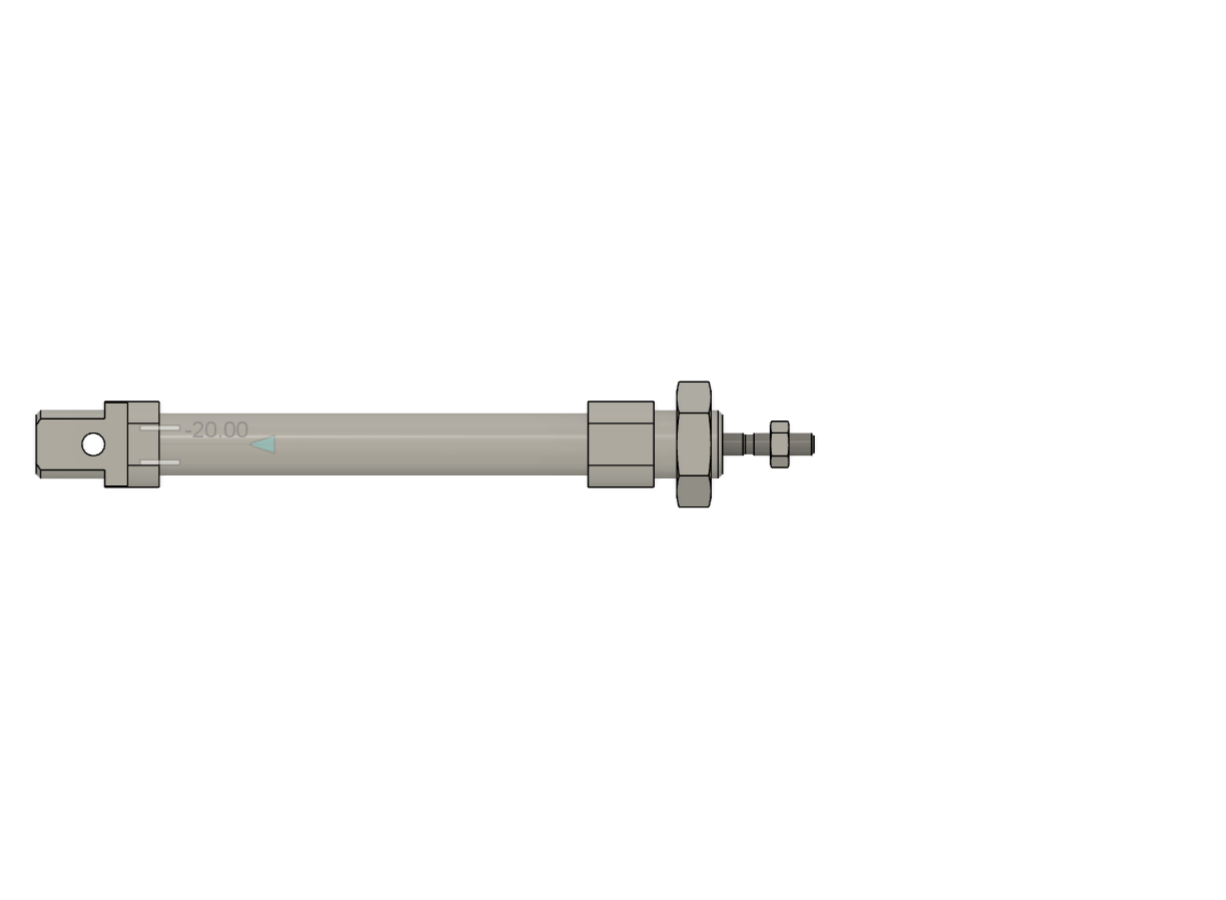
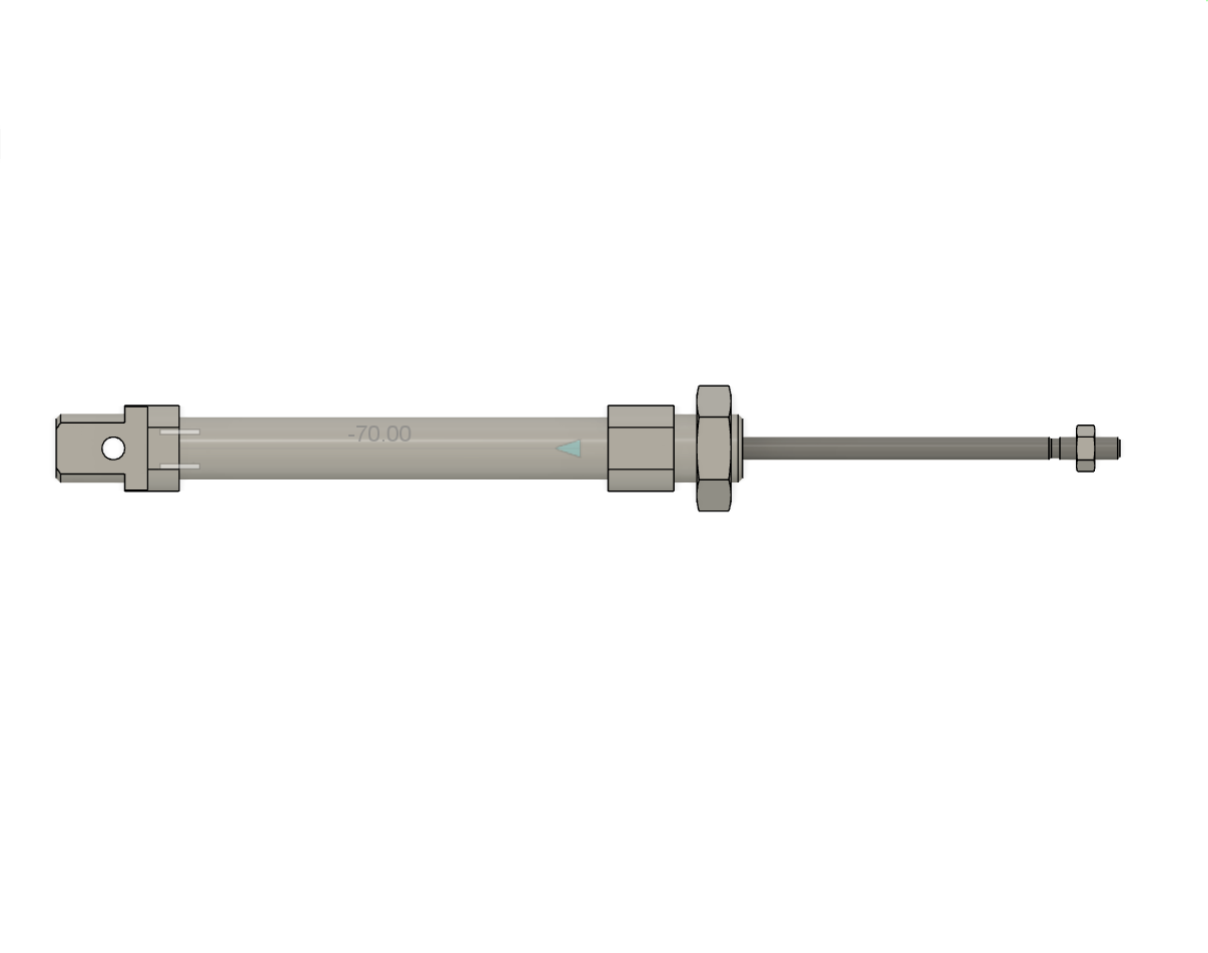
エアシリンダとはアクチュエータの一種で、空気圧の力を使用して下の画像のように動きます。
そして、この単純な直線的な動きを車輪を出し入れする動きに変換するのがリンク機構です。リンク機構は下の動画のように動きます。
設計
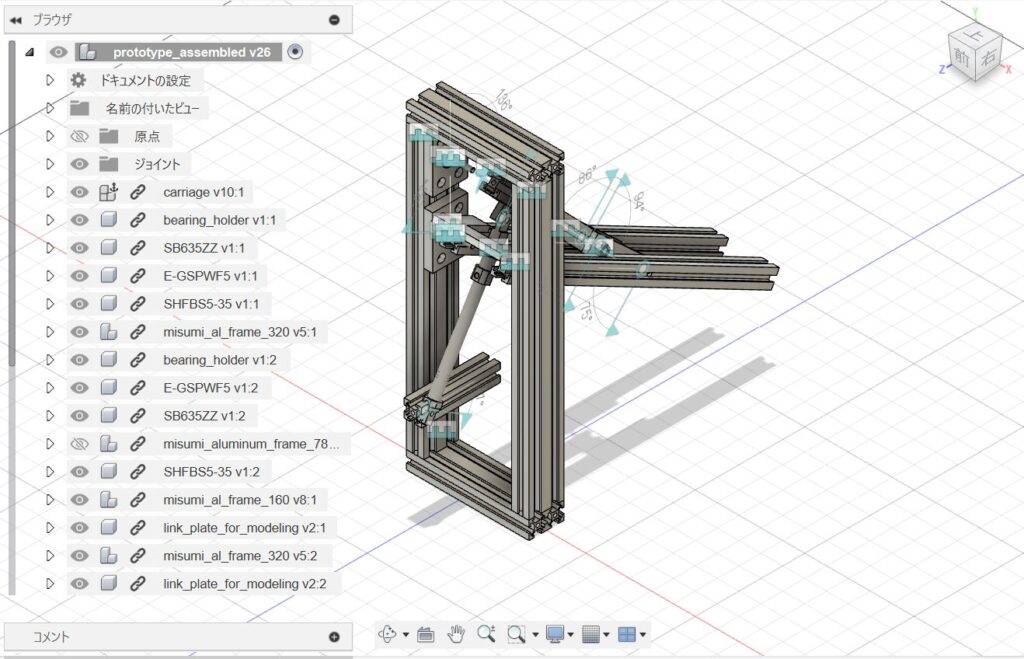
プロトタイプを作成して実際に機構がうまく動くか確かめるために、まずプロトタイプを設計します。設計にはAutodesk Fusionという3D CAD (設計ソフト) を使用します。
この設計がかなり大変で、シミュレーションではわからなかった問題が設計している途中に何個もわかってきます。例えば、シミュレーションではリンク機構の長さのみを考えていて、リンク機構自体の厚みを考えていませんでした。そうしたら、その厚みのせいでエアシリンダと干渉することが判明。設計変更する必要がありました、、、
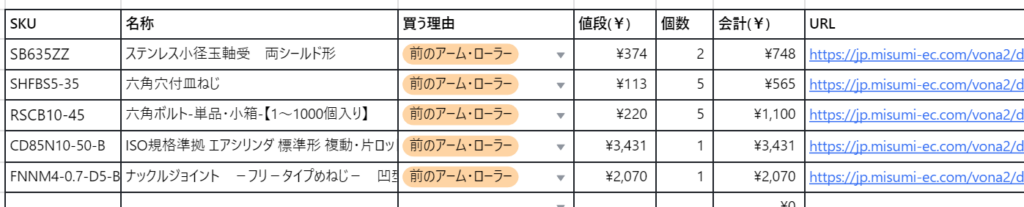
そして、設計が終わったら部品リストを作って発注!と行きたいところですが、このまま部品を発注すると千葉工業大学の冬休み中に届いてしまうことが判明。というわけで部品の発注は休み明けにせざるを得なくなってしまいました、、、













コメントを残す