今日は、オフシーズンロボット第二弾ということで、リフトの動かし方について、紹介をしていきたいと思います!
前回の記事(こちら→オフシーズンロボット第一弾 | FRC / FTC Team SAKURA Tempesta)からもあったように、私たちは今オフシーズンロボットを作っています。
そこで、ハード部(設計や組み立てをやる人たち)のうちの4人で、オフシーズンロボットの設計を分担して、進めることになりました!
筆者が担当しているのはリフトの枠組みの設計です。とはいえ、まずはロボット全体の説明をしないと、リフトの枠組みってなんぞやって感じだと思います(汗)なのでここで、さくてんのオフシーズンロボット計画、簡単に説明させていただきます!
第一弾でもあったように、今回のロボットは高さ55cmの台に登ることが目標です。そこで、今回はリフトという方法を使うことにしました。
リフトという名前通り、機構はエレベーターに似ています。想定はこんな感じです↓私の画力で伝わればいいのですが…
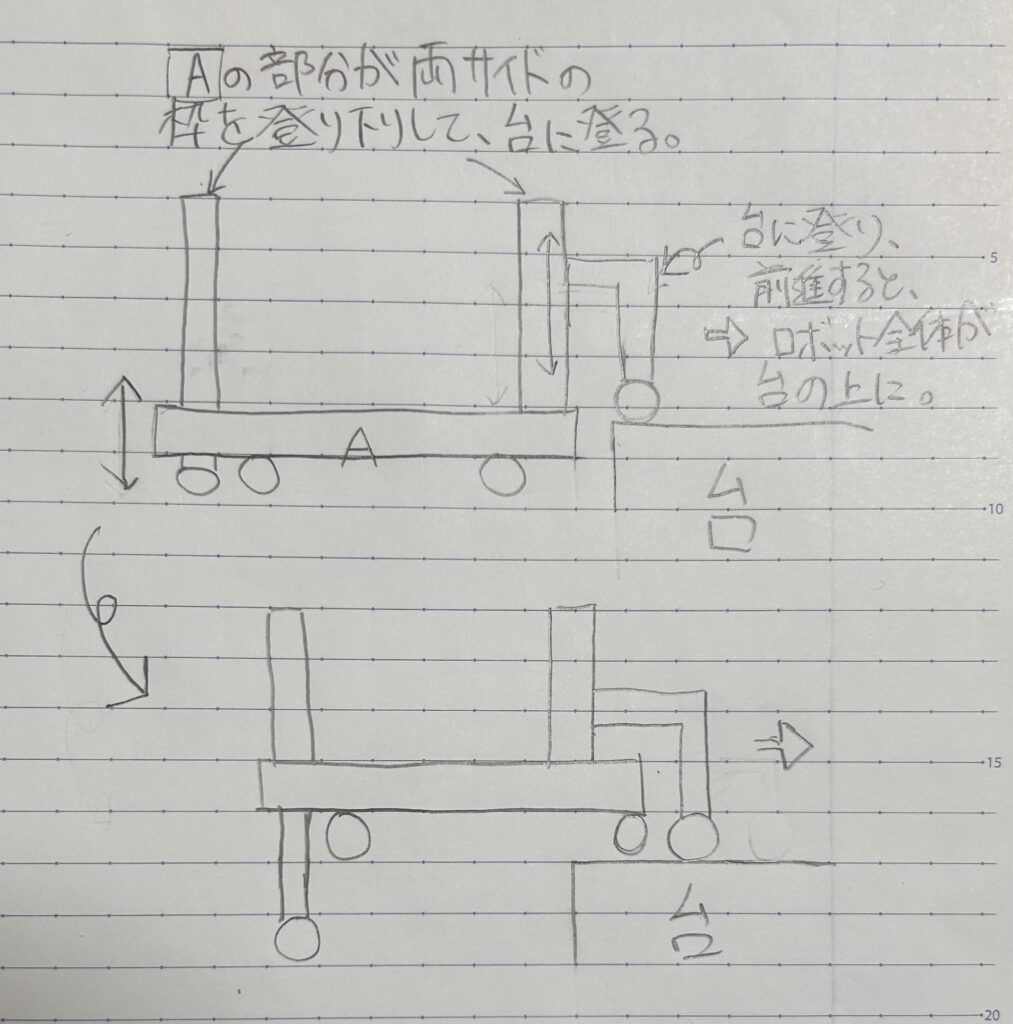
私はこの中の、前方のエレベーター(写真右側の枠組み)を担当しました。やはり、ロボットの全体重を支えないといけないので、ギヤボックスやスプロケット(チェーンをひっかけるやつ)選びは心がけました。
では、私の制作プロセスを紹介します!シンプルではあったのですが、私はロボット設計の経験が浅いので、わからないことだらけで、苦戦しました…でも色々と学べて、めちゃくちゃ楽しかったです!
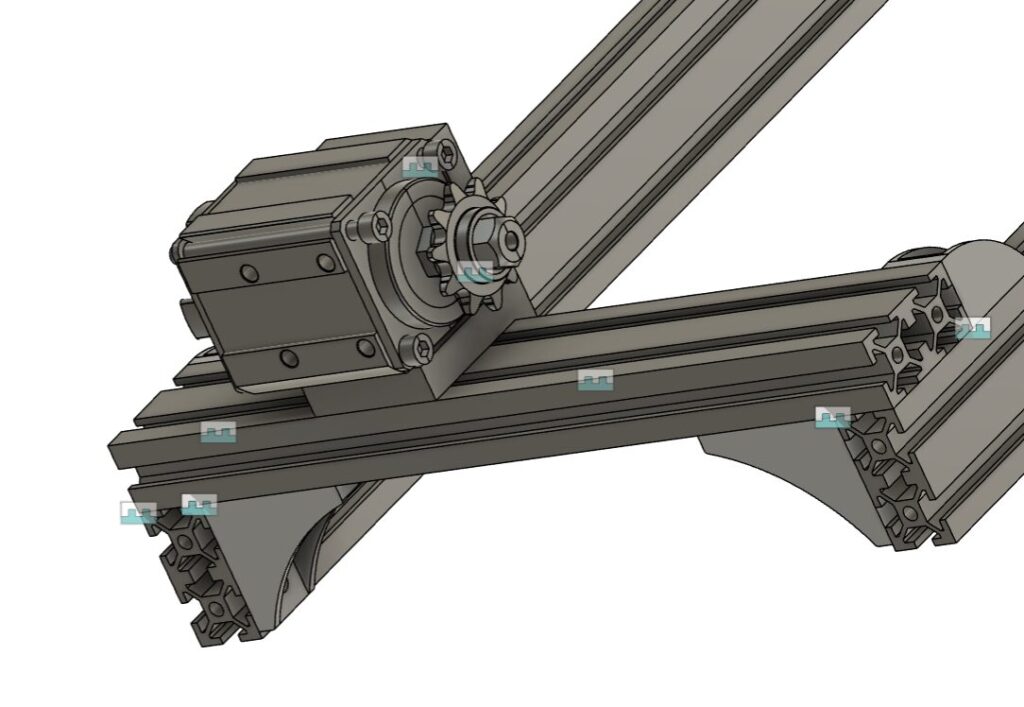
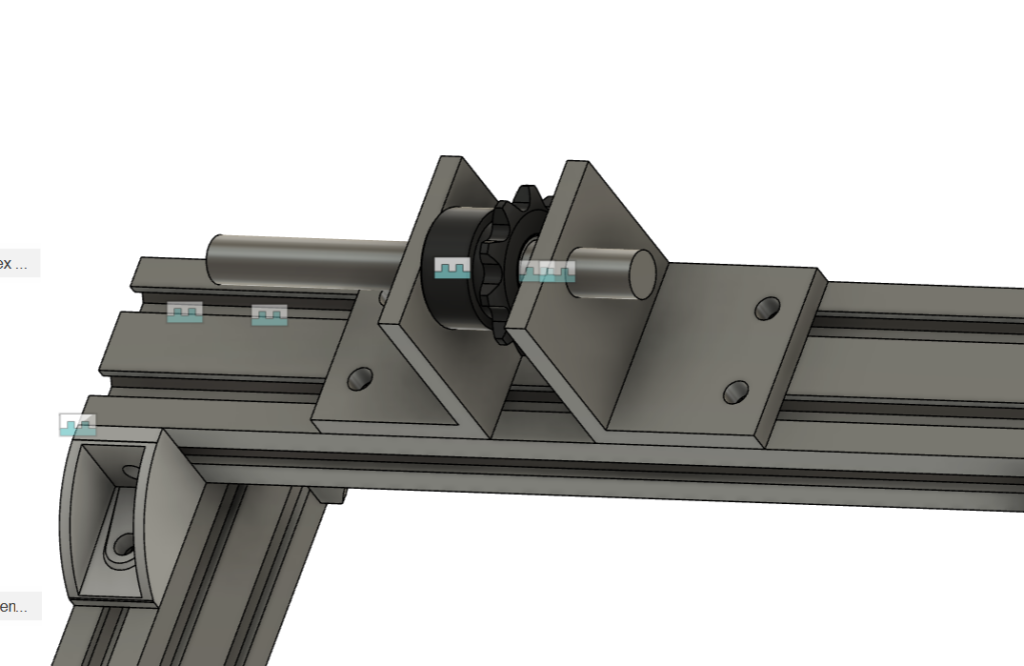
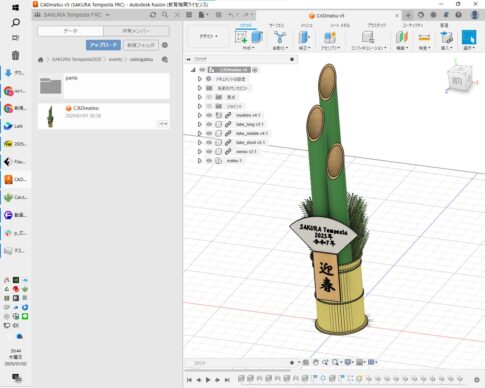
まず第一ステップ、Autodesk Fusionを使って、パソコン上で設計!Fusionは最近少しずつ使いこなせてきたかな、と思います!でもマスターするまでにはまだまだ道のりが長いです… 絵に描いたり、パソコン上で色々動かしてみたりしながら、試行錯誤して形になったときはとても嬉しかったです!(まだまだ先は長いですが、ひとまず満足^_^)
第二ステップは、実際にプロトタイプを組み立てていくことです。プロトタイプは、本番とはまた別で実験用に作成するものです。ロボットは一発でうまく動くことはないに等しいです。そこで、プロトタイプを作って確認をする必要があります。
プロトタイプは3Dプリンターで作成しました。やはり重さに弱く、壊れてしまいました… ですが動作には問題がなかったので、MISUMI様のmeviyを使って、本番用の部品を発注しました!届いた時はめっちゃテンション上がった!

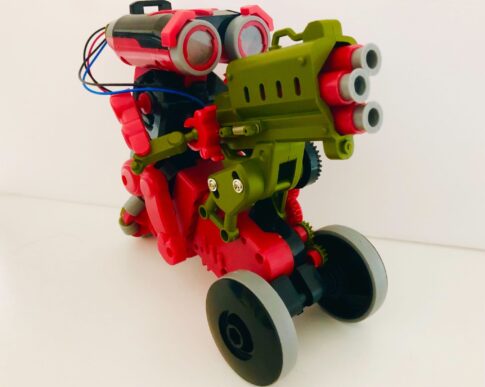
これを組み立てると…完成!
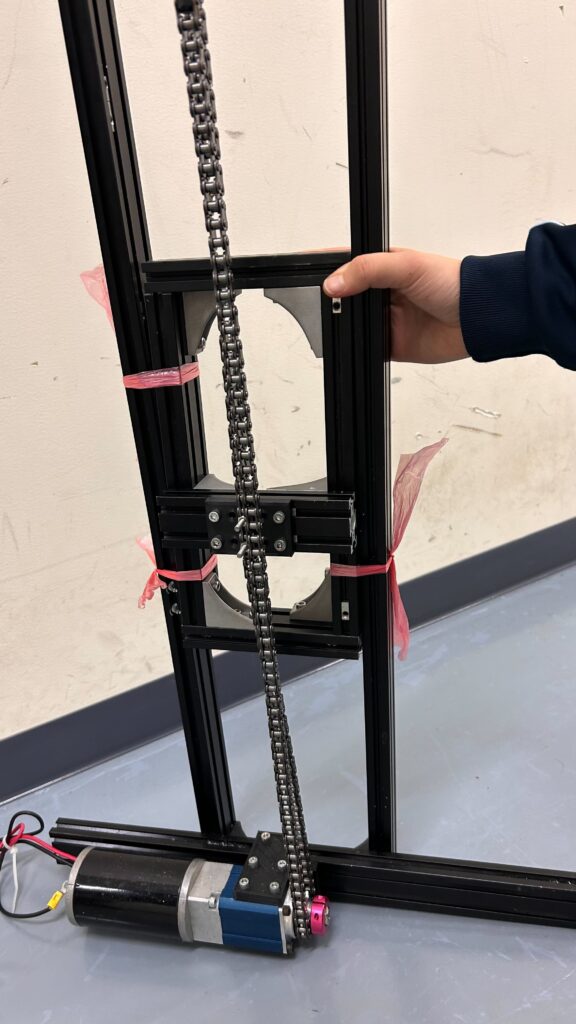

と思いきや、まだまだやることはいろいろとありました。私が今現在進行形で取り組んでいるのは、リミットスイッチ(マイクロスイッチとも呼ぶ)ものです。これをチェーンの一番下のところに置くことで、小さいアルミのフレームがロボットの底面にぶつかった時にスイッチが押され、地面についたという信号を送ることができます。そこの点を基準とした相対的な位置感覚を使ってロボットは動き、見事に台を登ることができます!まだまだやることは多いので、完成に向けて頑張っていきたいです。
ところでみなさん、このスズランテープでの固定に気になりませんでしたか??もちろん、本番でこのスズランテープを使うことは絶対にありません!(さすがにスズランテープが破れちゃう、、!)これはあるものの代替品です。このあるものが何かは、このオフシーズンロボットシリーズの第三弾で明かされます。どうぞ、お楽しみに〜















コメントを残す