12/20に千葉工業大学のfuRo(未来ロボット技術研究センター)のロボット見学をSAKURA Tempestaのためだけに行っていただきました。
その中で私がすごいなと思ったところを紹介します。ロボットが好きな人も普段はあまり気にならない人も最後までお付き合いください。
まず始めは
櫻壱號(サクライチゴウ)-福島第一原子力発電所で活躍したQuinceの後継機です。
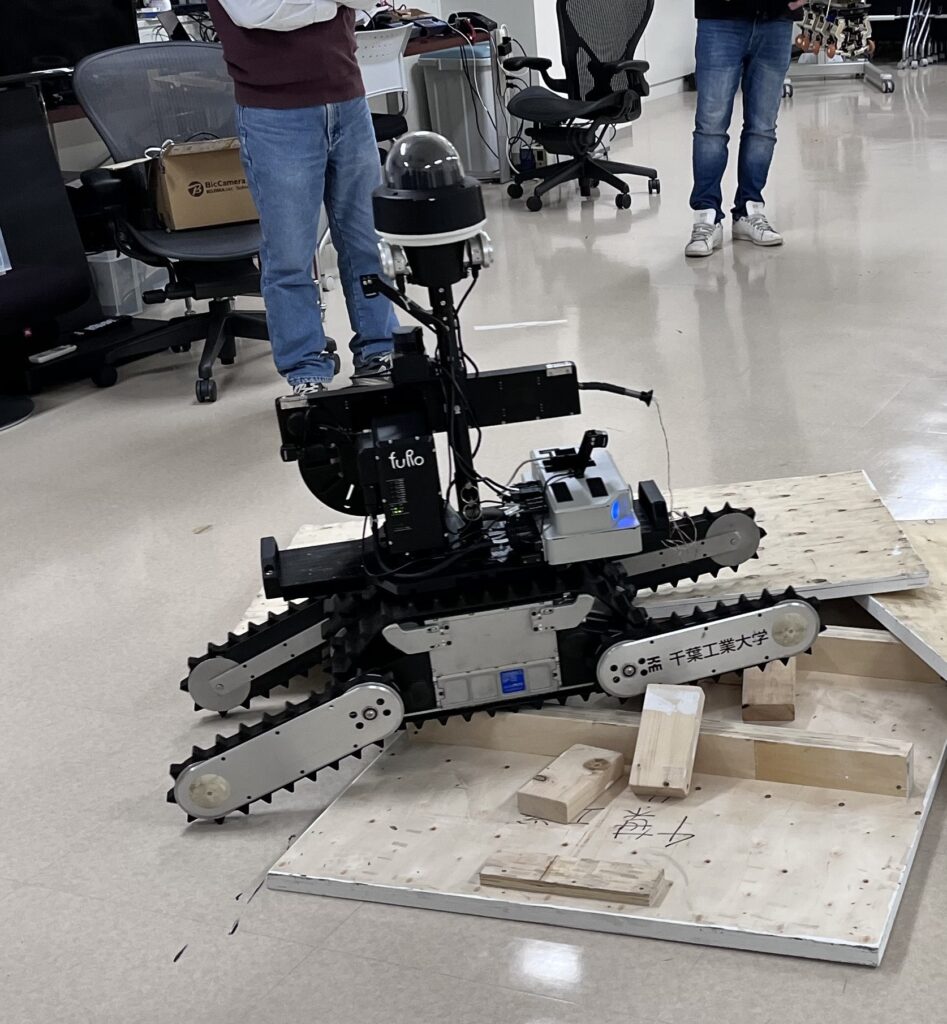
このロボットは瓦礫のあるような悪路でも進めることを実演していただきました。このような災害対応ロボットの特徴は重心が低くするため、バッテリーがロボットの下に入っています。そのため重心が床から数cmの高さにあり横に45度以上傾いていても動けるのです。
このようにロボットはもちろんすごいのですが一番工夫したところはコントローラとロボットをつなぐコードのテンションの張り方だそうです。分厚いコンクリートで覆われている原発内では無線が使えないためロボットを操作するためのコードを伸ばしているのです。これをたるまないようにバネや振り子を利用してテンションをかけているのです。
二つ目に見せていただいたのはCHERIという天井裏に入るロボットです。
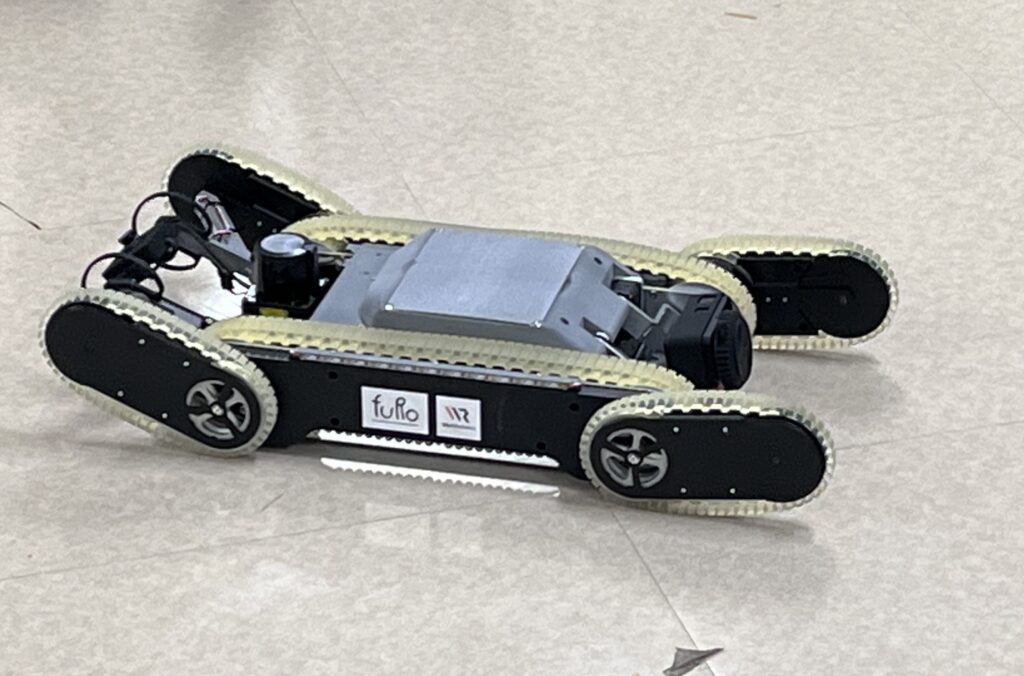
足回りの構造は先ほどの櫻壱號と似ていますが圧倒的に小さいのです。小型化は簡単なことではないそうです。基盤を小さくしたりモータの数を減らしたりしたそうです。もう一つ注目すべきはカメラの動きです。進行方向を向いているカメラが何にぶつかったときどうなるでしょう?もちろん壊れるわけにはいきません。ぶつかったときに物理的に押し倒されるのです。しかし、自ら倒したい時にどうしますか、小型化のためにモータは使えません。アームに磁石を使って固定するのです。アームに動かしてもらっています。
三つ目に見せていただいたのはHalluc-IIχ(ハルクツー・カイ)です。
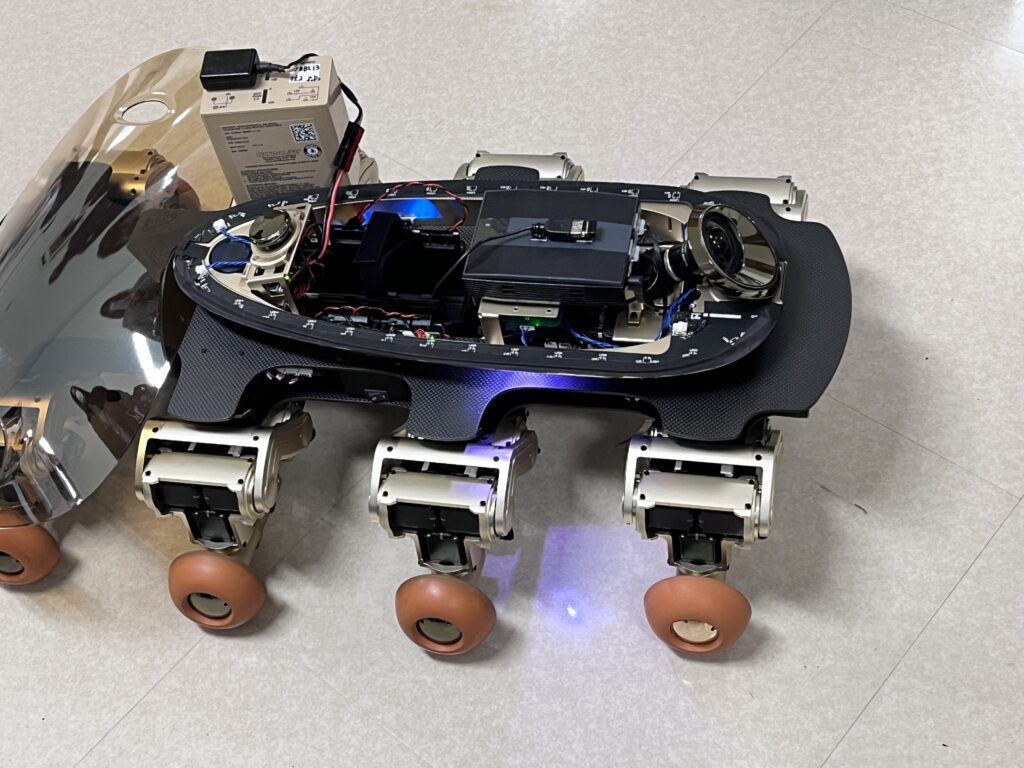
これまでの2つのロボットとは見た目も用途も違います。近未来的な足が8本あるロボットの塊です。というよりも8本の脚それぞれがロボットのような存在です。一つの足には7個のモータがついています。つまり全体で56個のモータがついています。8つの足をきれいにそろえなければうまく動きません。なぜならもし、足が少しでも外側を向いていたらまっすぐ進めません。さらにモータに負荷がかかり故障の原因にもなります。これを防ぐため、ロボットの動きにも工夫があります。さらにこの足のパーツはすべて合金の削りだしで造られているそうです。
そして、fuRoのロボットは見た目にもこだわって作られています。
普通製作するとき機構設計がある程度できてからデザイナーが加わりますがfuRoの場合ははじめからデザイナーと相談しながら制作しているそうです。そのため見た目がとてもスタイリッシュに感じます。また、海外でも人気があるそうで世界中を旅しているそうです。
どうしても気になるのがどう運んでいるのかです。SAKURA Tempestaではハワイまでロボットを3つに分けて木箱にいれました。このロボットの場合は専用のジュラルミンケースに見とれてしまいました。バッテリ―や予備のパーツも一つにまとまってしまうのです。
このほかにも様々なロボット見せていただきましたが、紙面の都合上続きはまた別の機会に書こうと思います。
fuRoのロボットは見た目にも使い勝手にもこだわって作られています。さらにロボットのメインではない細部まで気を配って作られていて感動しました。
fuRoの皆さんお忙しい中ありがとうございました。















コメントを残す