今年度私がビルディングシーズン開始からずっと担当していたClimb機構のプロトタイプの設計が終わりました!
Climb機構の設計途中の様子については、https://www.sakura-tempesta.org/blog/design-of-the-climb-mechanism/に書いてあるので、まだ読んでいない方はぜひ読んでください。
さて、前回ではClimb機構のCAGEを掴むところ (さくてん内ではCAGE Catcherと読んでいます) のプロトタイプの設計をしている様子を紹介しました。今回は、Climb機構の最も力の必要なところ、アーム (さくてん内ではClimber Armと読んでいます。以下Climber Armと書きます) のプロトタイプの設計について紹介します。
Climber Armとは?
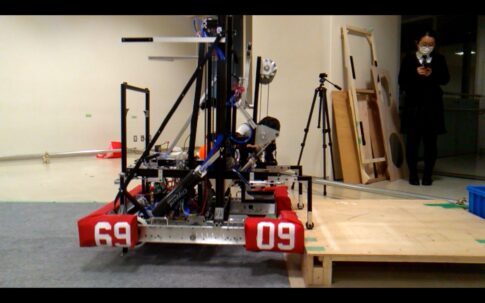
クライムする際は下図のようにCAGEをつかんだ後、機構全体を横に倒す必要があります。この役割を果たすのが、Climber Armです。
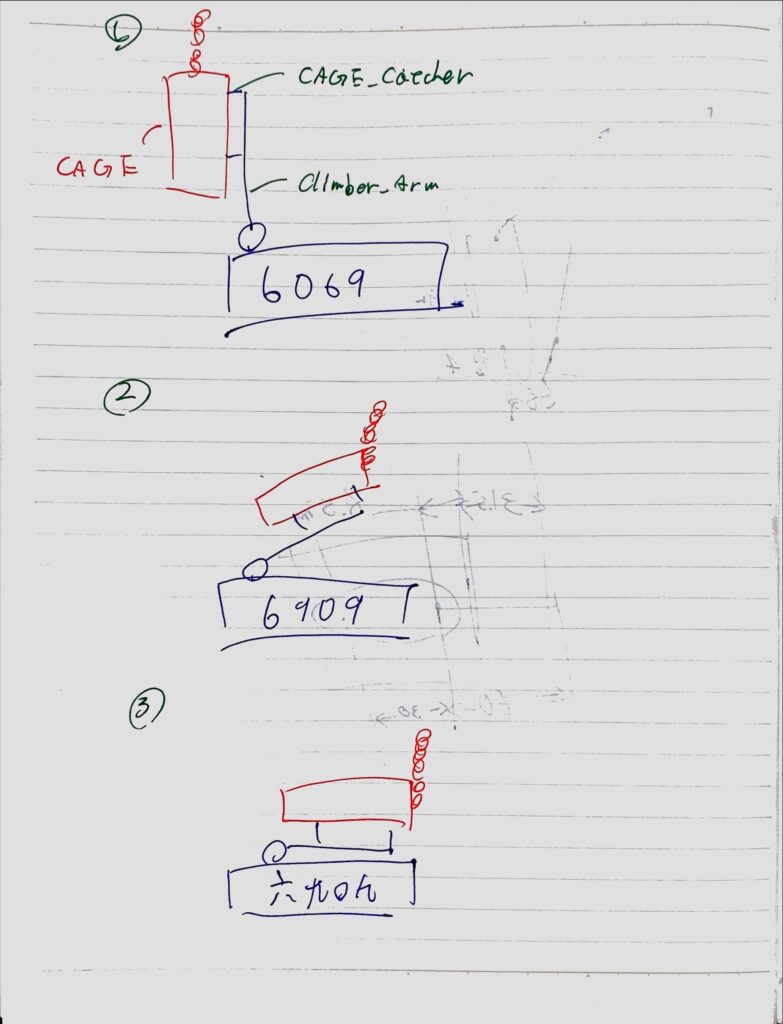
ロボットの全重量 (70kgf弱) がかかる部分で、ロボットの中では最も負荷のかかる部分になっています。そのため、他の部分の設計と比べて特に強度に気をつけないといけない部分です。
そして、このClimber Armにはもう一つの役割もあります。それは、クライムした後ロボットが落ちないようにする役割です。
FRCでは、試合が終了すると同時にモータへの電力供給が止まります。そして、クライムが成功したと判断されるには試合が終わってから3秒間は地面から浮いていなければならないのです。そのため、このClimber Armはモータへの電力供給が遮断された後も持ち上がった状態をキープする必要があります。
Climber Armの仕組み
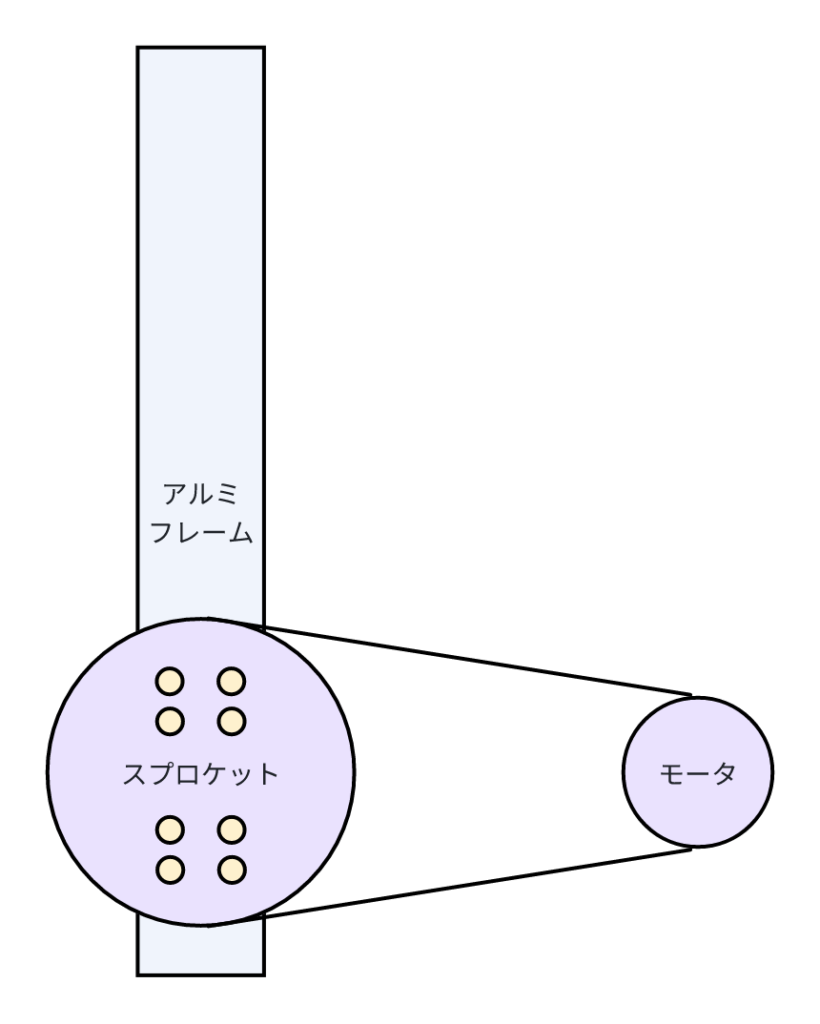
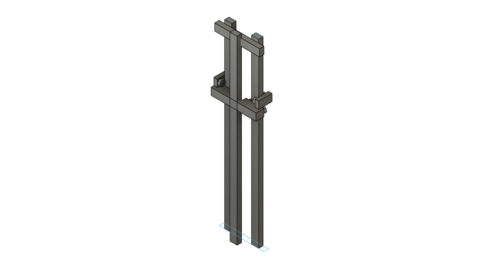
仕組み自体はシンプルで、スプロケットを取り付けたアルミフレームをチェーンを使用してモータで動かす、という仕組みです。
そして、「ラチェット機構」と呼ばれる機構を使用して、電力供給が遮断された後もクラムされた状態を維持します。ラチェット機構とは決められた回転方向のときだと回ることができますが、逆向きに回そうとするとロックが掛かって動かないようになります。ラチェット機構の動きについては、下の動画がわかりやすいと思います。
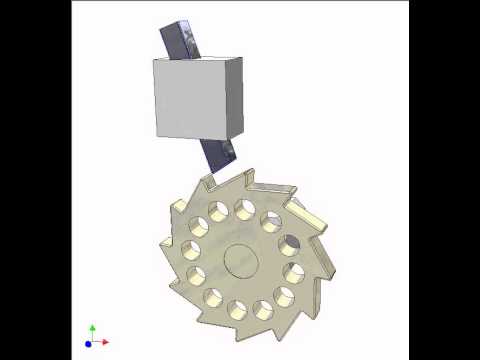
このような仕組みでClimber Armは動作します。
設計の紹介
長さなどの決定
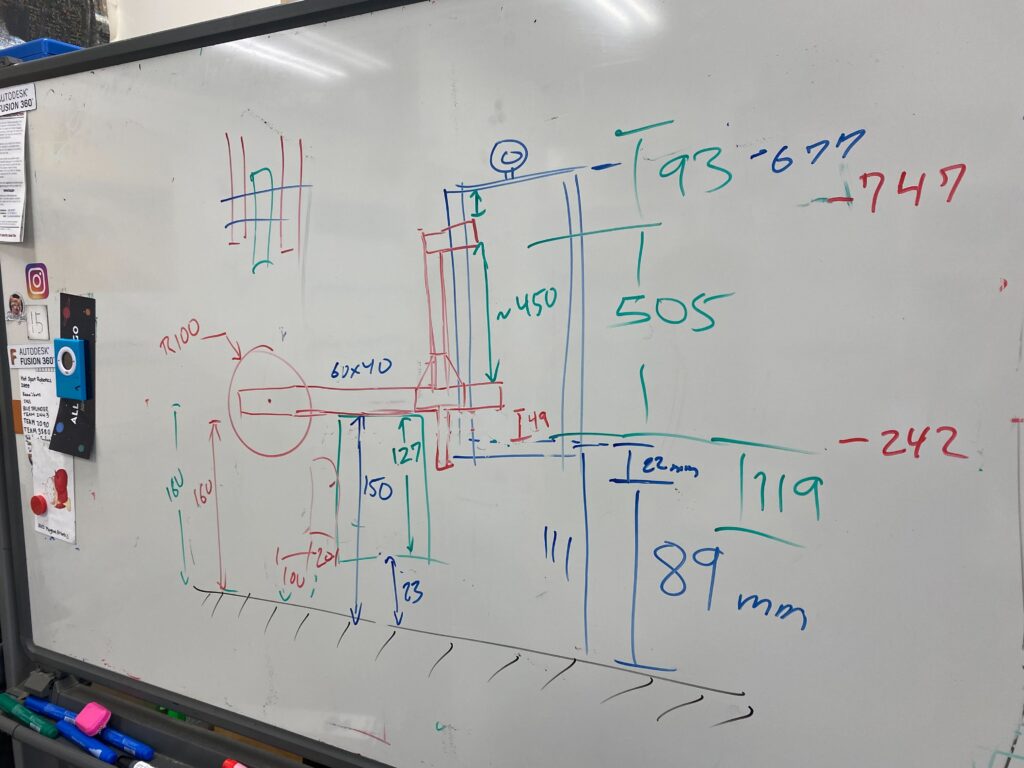
CADソフトを使って設計を始める前に、ホワイトボードを使っていろいろな長さなどを決定する必要があります。例えば、
- アームの長さは何mmなのか
- スプロケットの中心は地面からどれだけ離れているのか
- どんなサイズのスプロケットを使うのか などなど、、、
このような長さを決定するために、ハードのメンターさんであるDanielさんと相談していろいろな長さなどを決定しました。この過程が今回の設計の中で最も難しかったと感じます。
軸部分のなど設計
次に、Climber Armの回転中心となる軸部分やスプロケットとつながる部分の設計です。
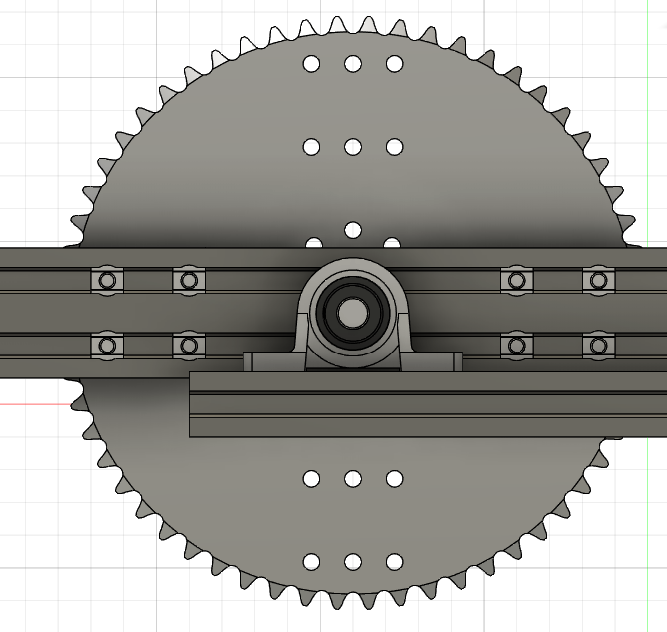
自分が去年担当したshooterとは違い、Climbは非常に高い負荷がかかる場所です。そのため、「どんな太さのねじを使えばよいのか」「ねじは何本挿せば十分なのか」などいろいろなところで戸惑いました。
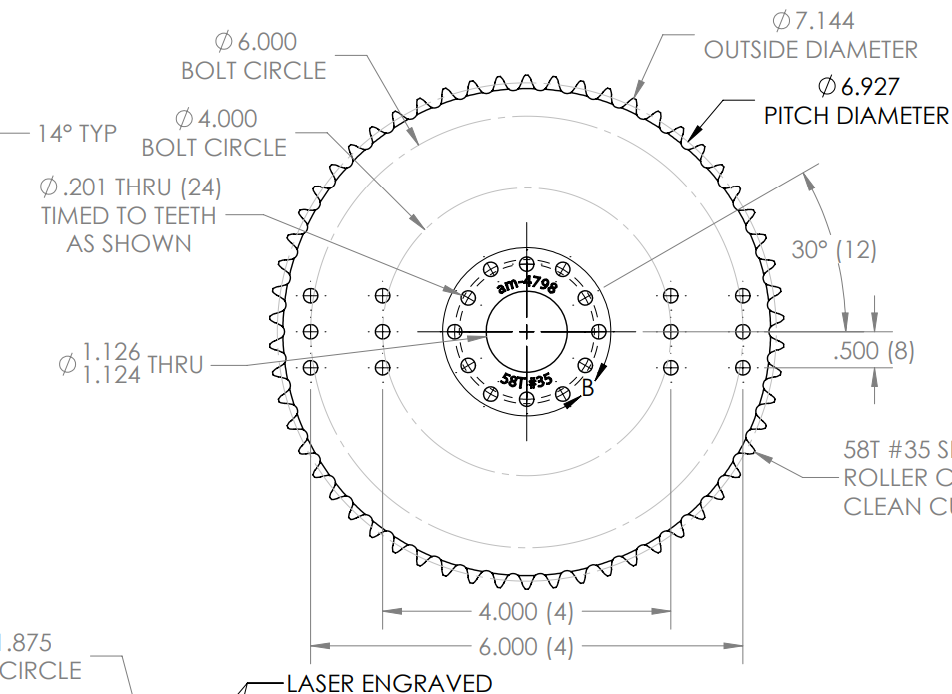
そして、これは毎回FRCのロボットを制作する際はそうなのですが、またもやインチに悩まされました。日本で売っているものはほとんどミリで設計されています。例えば、アルミフレームのねじとねじの間は20mmで製造されています。ところが、今回使うスプロケットはアメリカ製です。アメリカ製の製品はほとんどインチ規格で設計されています。例えば、このスプロケットの穴と穴の間の距離は1インチ、すなわち25.4mmです。微妙にアルミフレームと寸法が違います。そこで、スプロケットに最初から開けられていた穴は無視して新しく穴を開ける必要がありました。もしアメリカもミリ規格で作られていればこんな面倒くさいことしなくて良いのになぁ、、、と思いました。というかFRCの設計をするときに毎回思ってます。
モータ部分の設計
流石にギヤボックスやラチェット機構を自作することは技術的にも資金的にも難しいので、売られているモジュールを使用します。
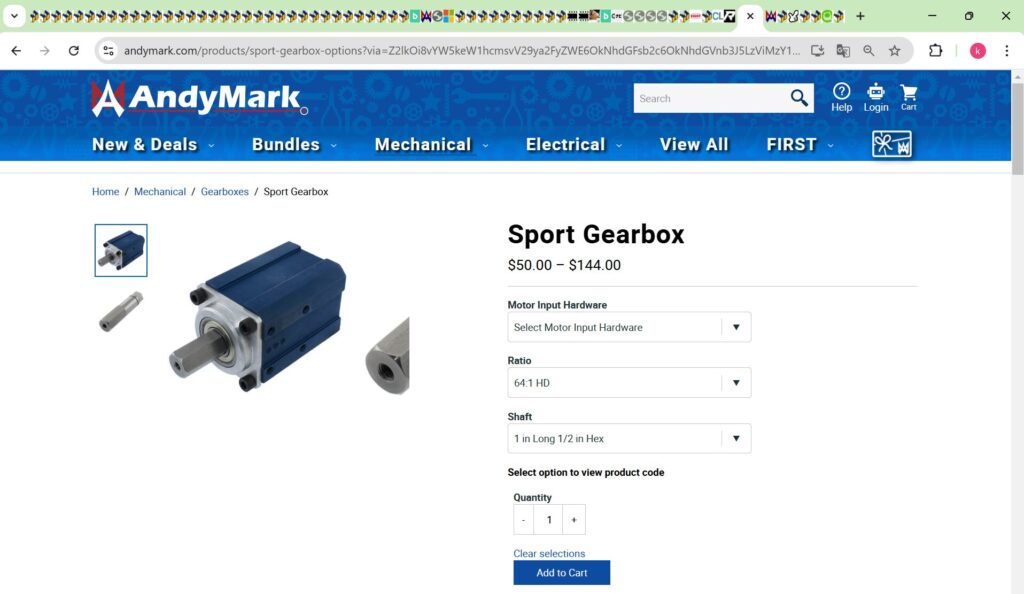
もちろん、これらもインチ規格で設計されています。そして、固定する先のアルミフレームはミリ規格。もちろんこっちも合いません。こっちはギヤボックスとアルミフレームの間に板を入れて、それにねじで固定することでこの問題を解決しました。こんな都合の良い寸法の板は売ってないので、ミスミ様のメビーというサービスを使用して板を作ります。

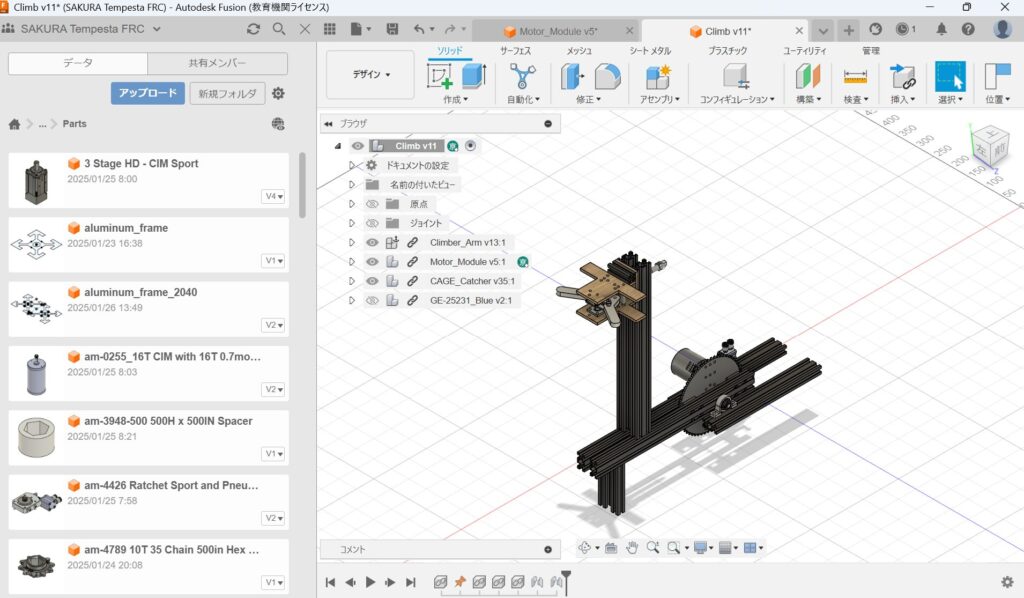
完成!!
前回紹介したCAGE Catcherと、今回紹介したClimber Armを組み合わせれば、Climbのプロトタイプの設計が完了です!
今後について
今後は、このプロトタイプに必要な部品をミスミ様に発注し、実際にプロトタイプを組み立てていきます。
また、他の機構の設計についてもこのWebサイトに投稿していく予定ですので、ぜひチェックよろしくお願いします!!














コメントを残す