Climb機構とは?
今年のゲームではCAGEと呼ばれる鎖で上から吊り下がっているものに登る必要があります。
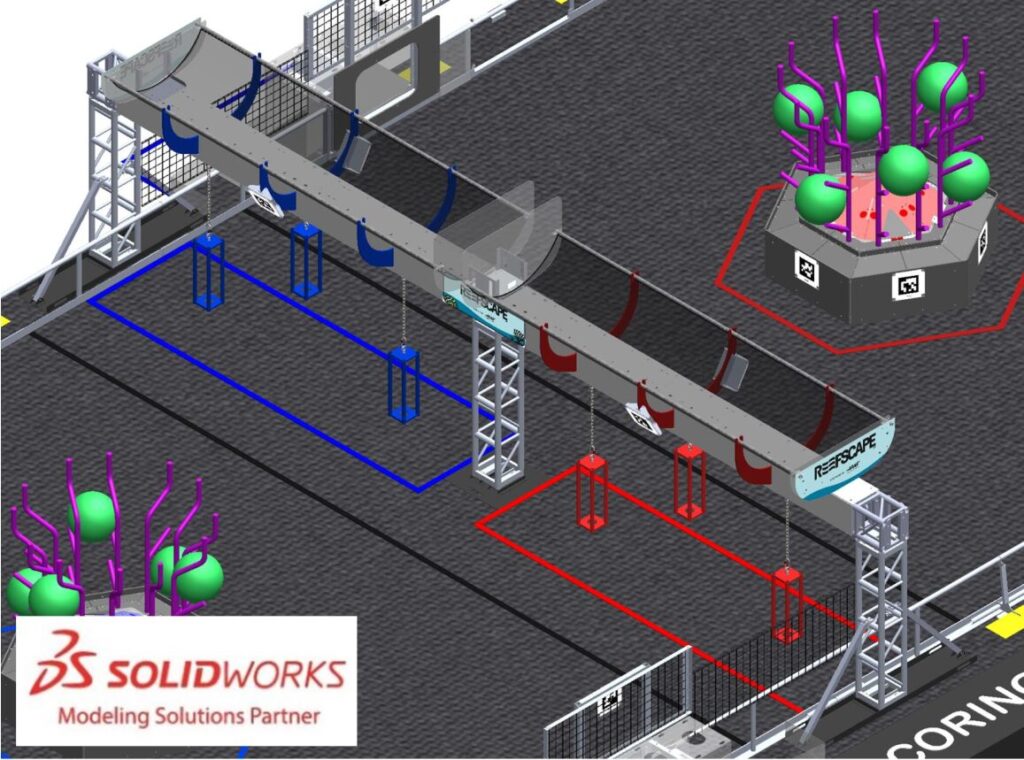
上の画像において中央にぶら下がっている赤と青のものがCAGEです。
このCAGEには2種類あり、ぶら下がっている高さにより名前が違います。
左側にあるのがShallow CAGE、右側にあるのがDeep CAGEです。Deepのほうが登るのが難しいですが、12点というかなりの高得点をもらうことができます。私達はロボットの要求会議にてDeep CAGEに登ることに決定しました。ロボットの要求会議についてはhttps://www.sakura-tempesta.org/blog/robots-specifications-2025/ に詳しく書いてありので、ぜひ読んでみてください。
Climbの仕方
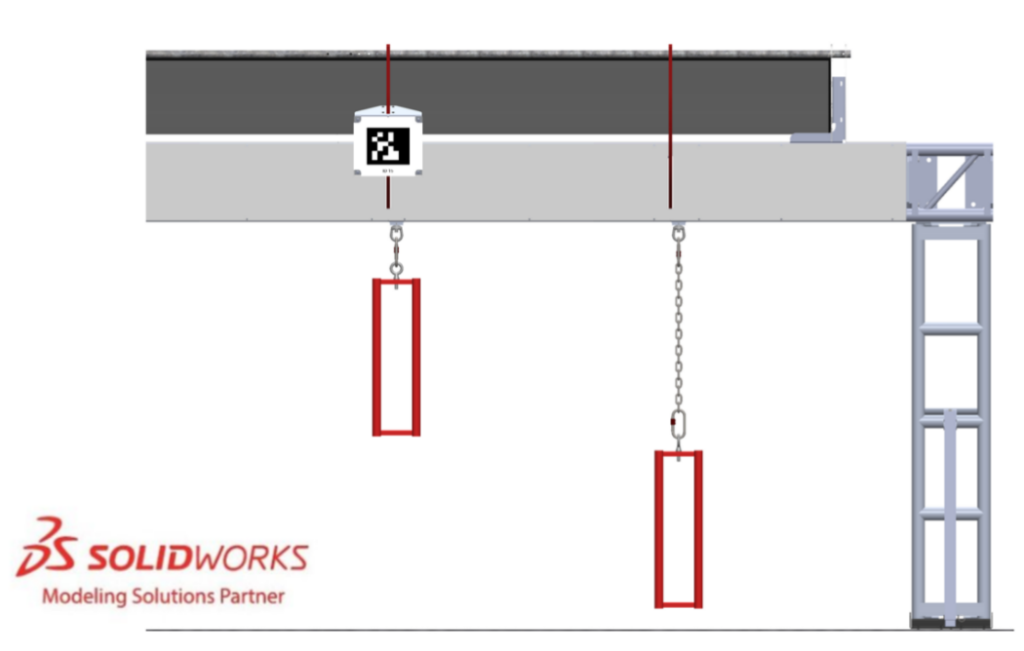
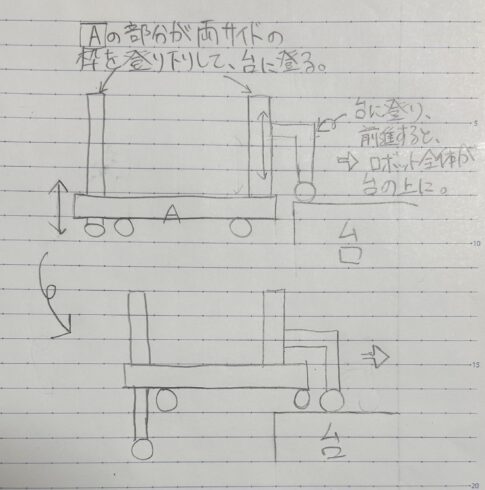
Climbは下の画像の様な感じで行います。
- CAGEの上の部分を掴み
- アームを使ってCAGEを倒しながら登っていき
- 最後にClimb完了!
という流れです。
なぜわざわざこのような動きをするのかというと、それはDeep CAGEの高さが理由です。Deep CAGEは下から89mmしか浮いていません。そのため、ロボットがCAGEの下に入り込むことができないのです。なので、このようにCAGEを横にすることによってClimbするようにしています。
CAGEの掴み方
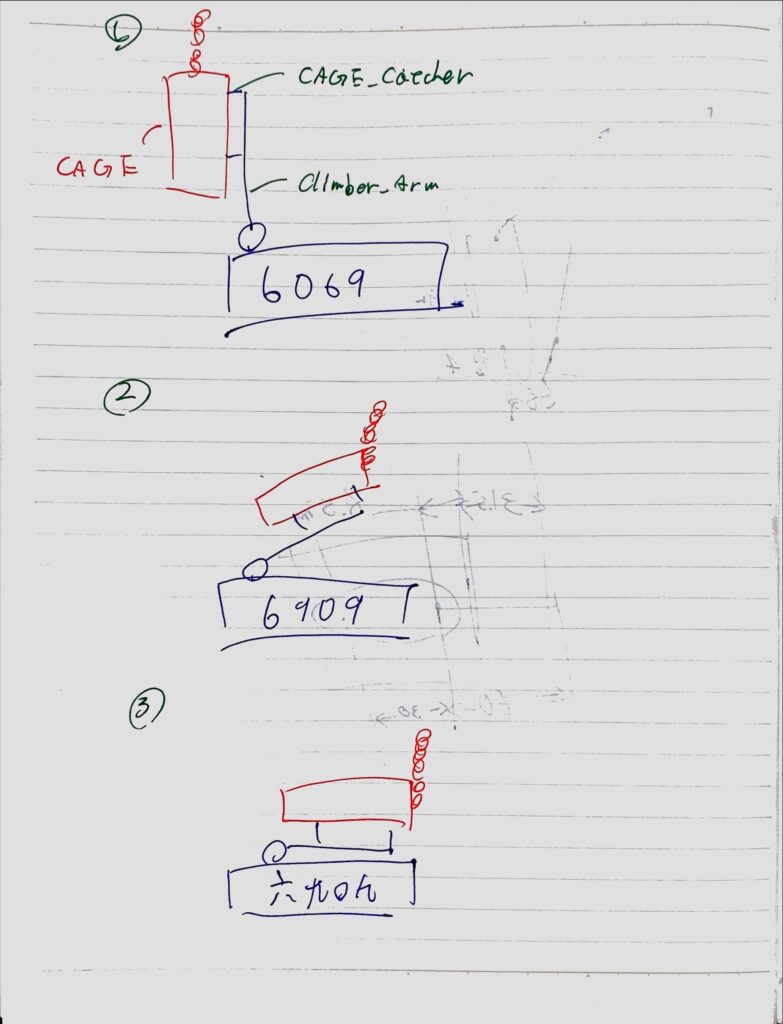
CAGEはこのような動きをするリンク機構を使用することによって掴みます。CAGEの横の部分にこのリンク機構を閉じた状態で入れたあと、開くことにより掴むことができます。
今はマウスで手動で動かしている部分は実際はエアシリンダというものを使用します。エアシリンダは空気圧でものを前後に動かすことのできるアクチュエータです。これを使用することにより、制御が簡単になるというメリットがありますが、リンク機構の設計が難しいというデメリットがあります。
このリンク機構を設計するのがかなり大変で、長さを決めるだけでも数日かかってしまいました。ですが、オフシーズンロボットのときは2週間くらい格闘していたので、それと比べるとオフシーズンロボットの成果が出たかなと思います。オフシーズンロボットのリンク機構についてはhttps://www.sakura-tempesta.org/blog/off-season-robot-4/に書いてあるのでぜひ読んでみてください。
最後に
今後もこのWebサイトにはロボットの設計の進捗を掲載していきますので、楽しみにしていてください。














コメントを残す